%20(2).png)
Type: Individual Project
Timeline: 6 Months
Site: Public Animal Shelters
Research: Interview & Testing
Design: UX & Hardware
Eng: Arduino Prototyping
Python
Arduino
Mermaid
Why do shelter dogs struggle to connect with humans?
While volunteering at animal shelters, I repeatedly saw dogs labeled as “unfriendly” or “disinterested.” In reality, many were physiologically overwhelmed by noise and unpredictability. Their stress was invisible, but it directly shaped how humans interpreted their behavior and whether they were adopted.
Goal
To create conditions where calm and trust between human-dog interaction could emerge naturally, even in noisy and unpredictable shelter environments.

Resonance is a wearable system that guides humans into a slower and more predictable rhythm through gentle haptic and visual cues.
As the human’s breathing and heart rate variability stabilize, the dog perceives a clearer and safer physiological signal.
This shifts interaction away from stimulation or control, and toward co regulation as the foundation for interspecies trust.
During long term volunteering at public animal shelters, I repeatedly observed the same pattern. As shelter capacity increased, adoption rates remained low, even as more dogs entered the system.
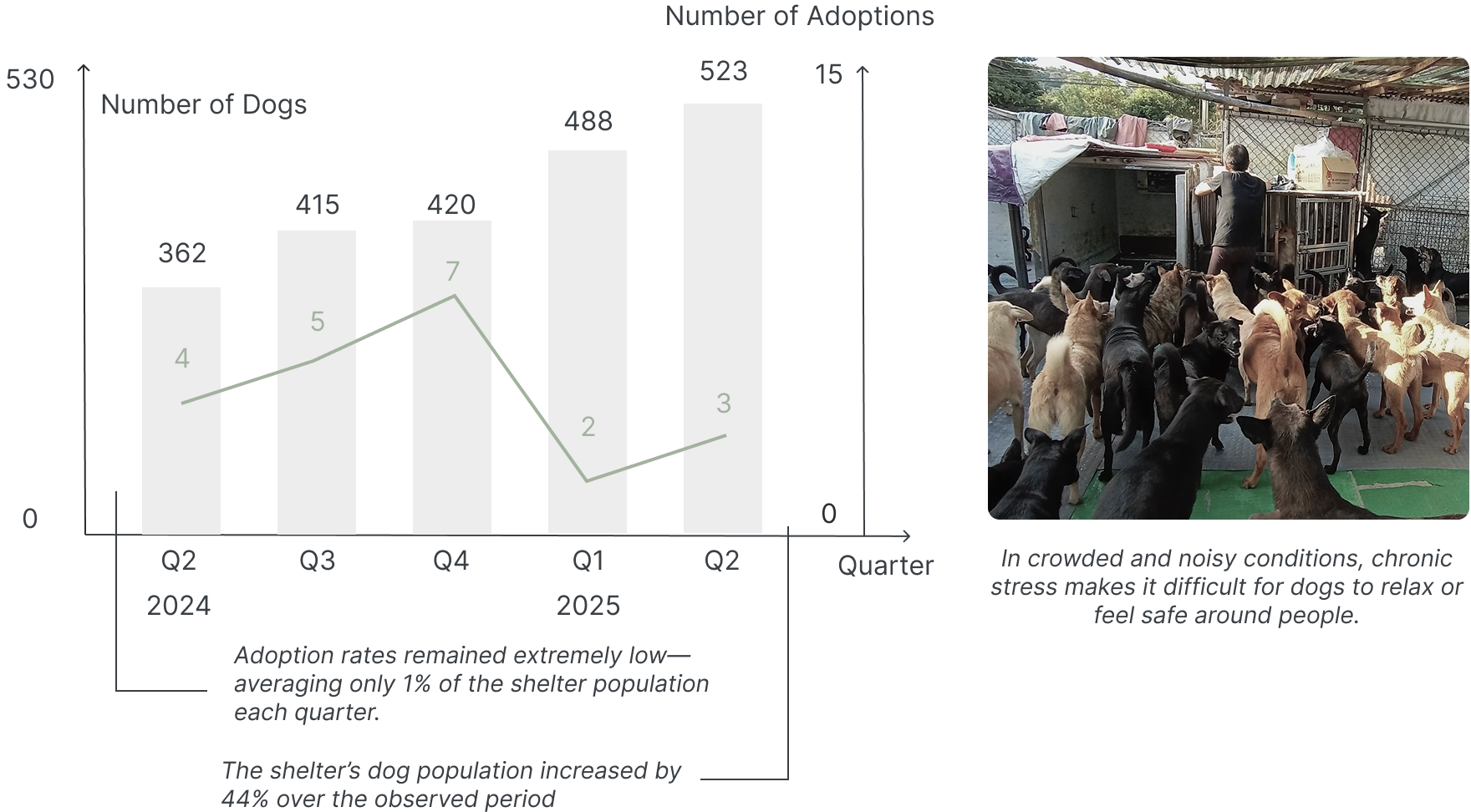
Interviews with shelter operators revealed a recurring pattern that extended beyond individual interactions.
Constant noise, overcrowding, and unpredictability prevent dogs from relaxing and accurately interpreting human cues. As stress accumulates, even friendly gestures can feel unsafe, reducing approach behavior.
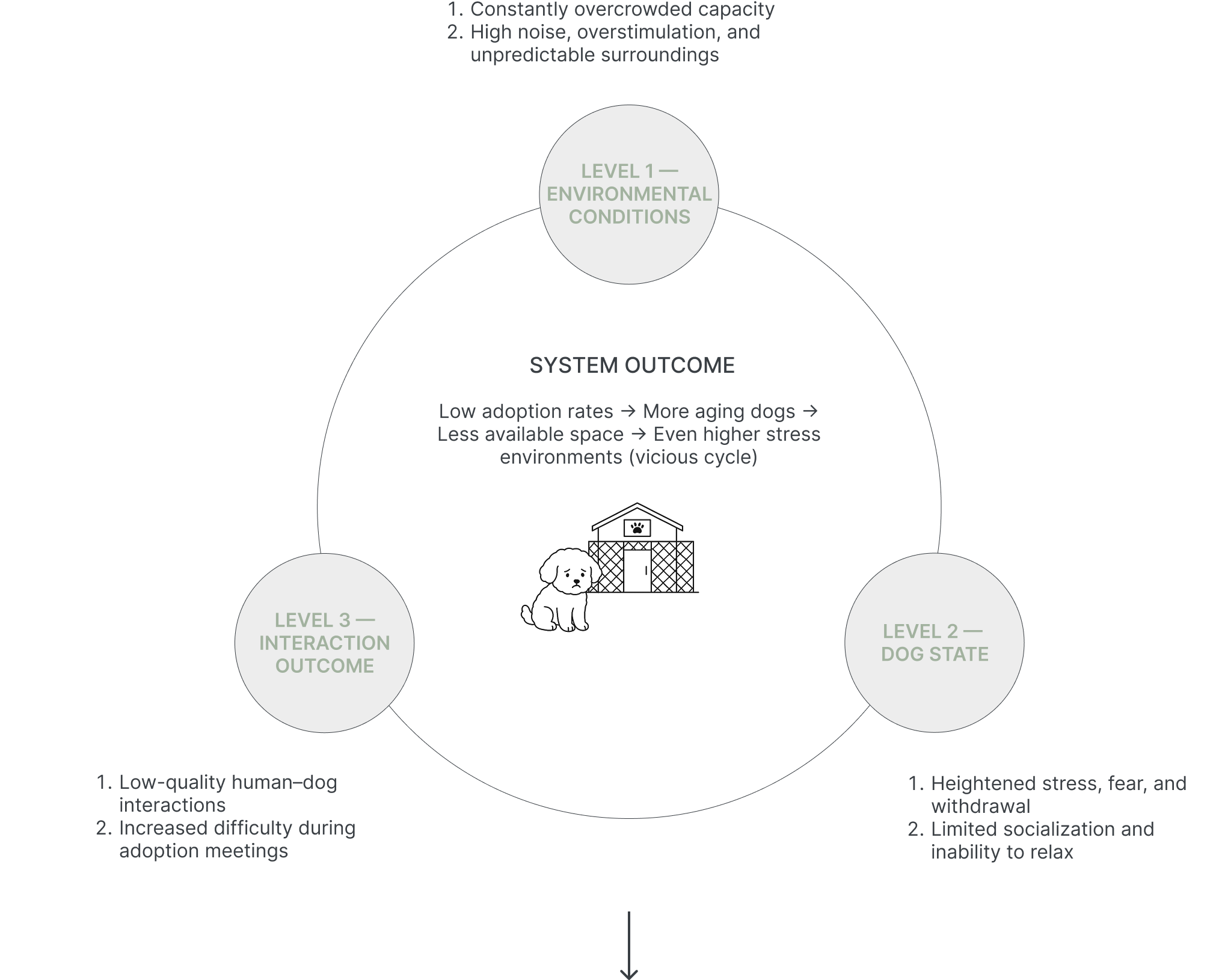
Environmental stressors shape dogs’ internal states, which in turn affect the quality of human–dog interactions. Reduced interaction quality lowers adoption rates, increasing crowding and further reinforcing stress.
The system diagram below maps how these factors compound into a self reinforcing cycle.
To address this, my research focused on two tightly connected areas.
First, how dogs cognitively and physiologically interpret human signals such as posture, movement, voice, and presence.
Second, how physiological markers related to stress and relaxation shape a dog’s ability to approach, trust, and engage during interaction.
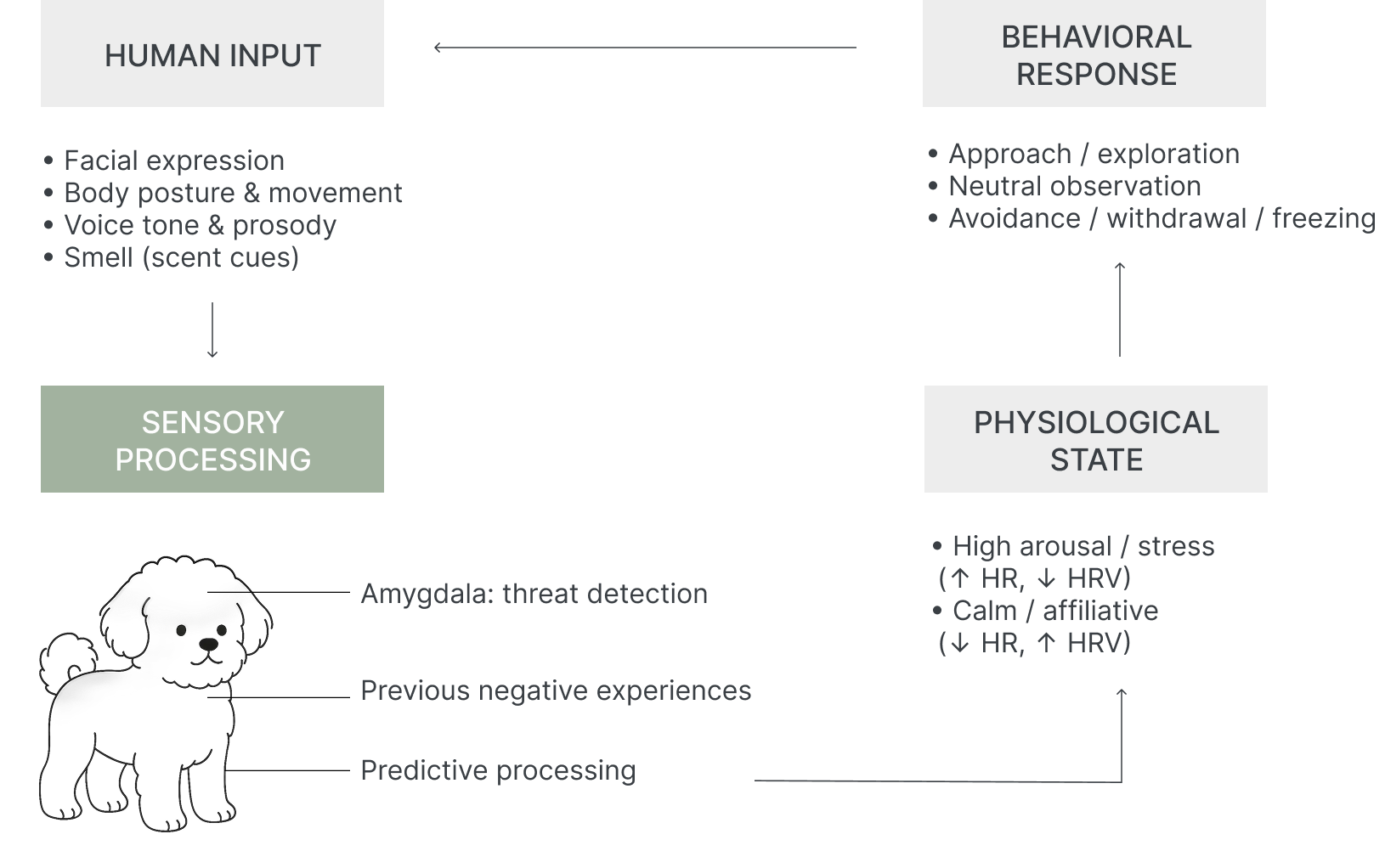
Dogs do not perceive humans as neutral objects. They rapidly evaluate posture, movement, voice, and scent to assess safety, shaping physiological state and readiness for interaction.
“A dog’s ability to trust does not begin with behavior—it begins with how its brain and body interpret human signals.”
This mechanism reveals where intervention can meaningfully change the interaction outcome.
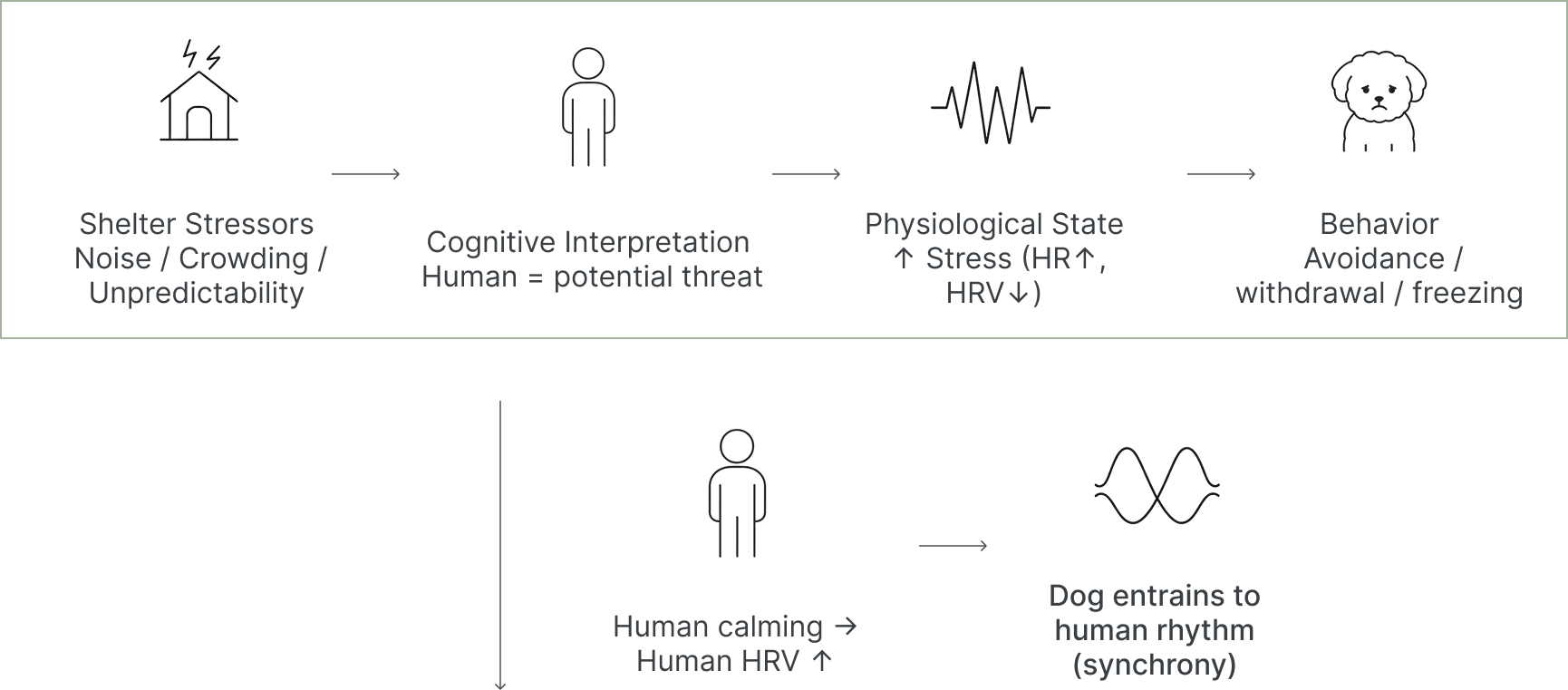
Positive Interaction CycleUnder high noise and unpredictability, dogs interpret human presence as a potential threat, triggering physiological arousal and withdrawal.
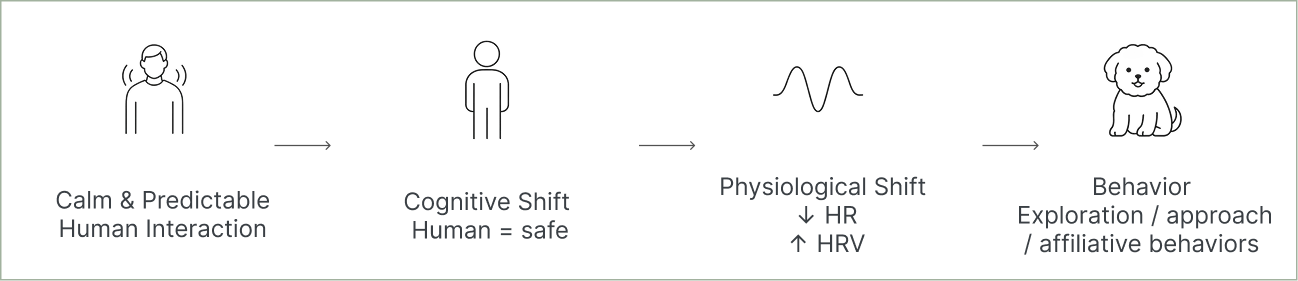
When humans regulate their own physiology and become calmer and more predictable, dogs can entrain to that rhythm, shifting the interaction toward safety and engagement.
This transition highlights a critical intervention point at the moment of human approach.
This research clarified three implications that directly informed the design.
Interaction quality depends on perceived predictability rather than intent alone.
Human physiological state sets the baseline for how safety is interpreted.
Rhythmic cues offer a reliable way to communicate calm in high stress environments.
I initially assumed that technology could help reduce canine anxiety by adding stimulation, such as play or interaction cues.
However, interviews and literature quickly revealed a critical constraint: chronically stressed dogs cannot benefit from added stimuli. Engagement depends not on stimulation, but on whether the human is perceived as safe.

Hypothesis 1: Environmental Stimulation
Use automated systems to provide consistent, low-pressure interaction cues without direct human involvement.
Failed: Mechanical output lacked the biological subtlety required for dogs to perceive a presence as socially safe.
Hypothesis 2: Remote Monitoring
Analyze canine behavior through cameras and relay insights to guide human interaction.
Failed: Accurately distinguishing stress from normal movement requires precision beyond reliable real-world deployment in shelter settings.
These failures clarified a deeper insight.
Shelter dogs often remain in a high-arousal, low-HRV state where human signals themselves feel unsafe. Research consistently shows that when humans regulate their own physiology, dogs are more likely to relax and engage.
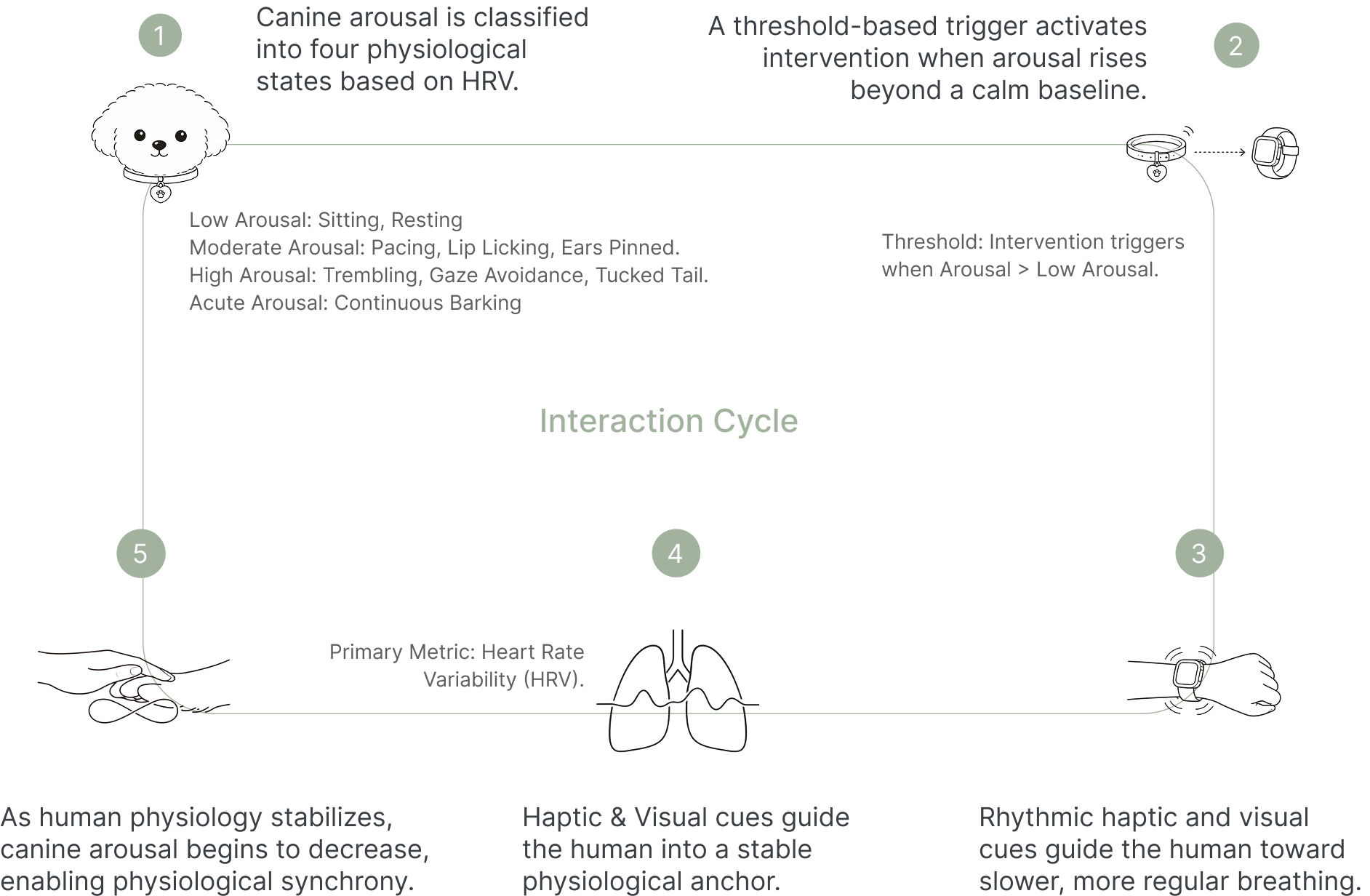
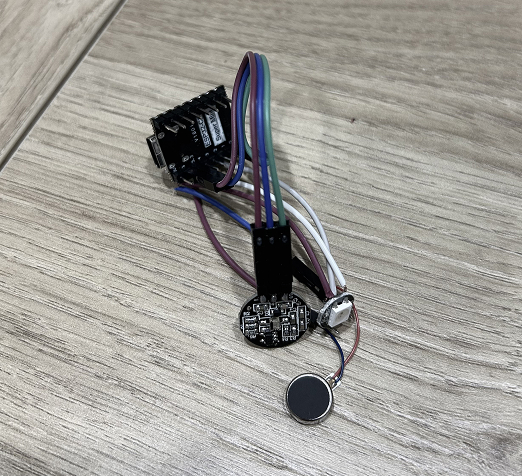
To operationalize this synchrony-oriented approach, I designed a dual-device system consisting of a canine collar and a human wearable.
The collar detects canine arousal signals, while the wearable delivers real-time haptic and visual cues to guide human breathing, forming a closed loop for physiological co-regulation.
Guided by research on physiological co-regulation, the system actively mediates interaction by regulating the human first, using breathing rhythm as the primary pathway to canine calm.
Main Feature
Non-Invasive Interaction
Event-Driven Co-regulation
Human-Centric Physiological Guidance
Context-Aware Multimodal Feedback
Digital interfaces often overwhelm elderly users with small screens and complex navigation.
To address this, we adopted a multimodal interaction model—combining high-contrast visuals, tactile controls, and voice guidance—to distribute cognitive load and make the routine intuitive and emotionally reassuring.
Instead of relying on a screen-first interface, the multimodal system ensures usability even for users with low digital literacy or declining vision.
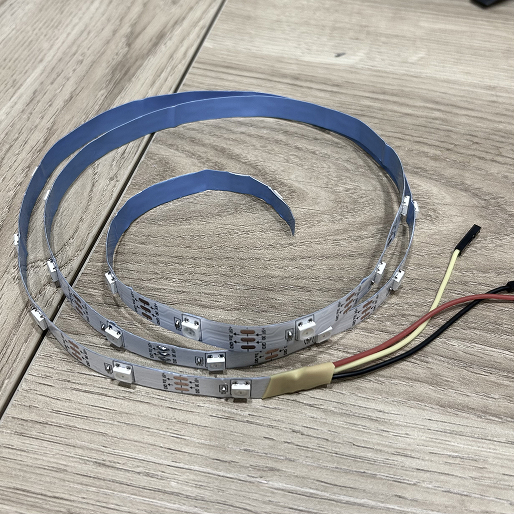
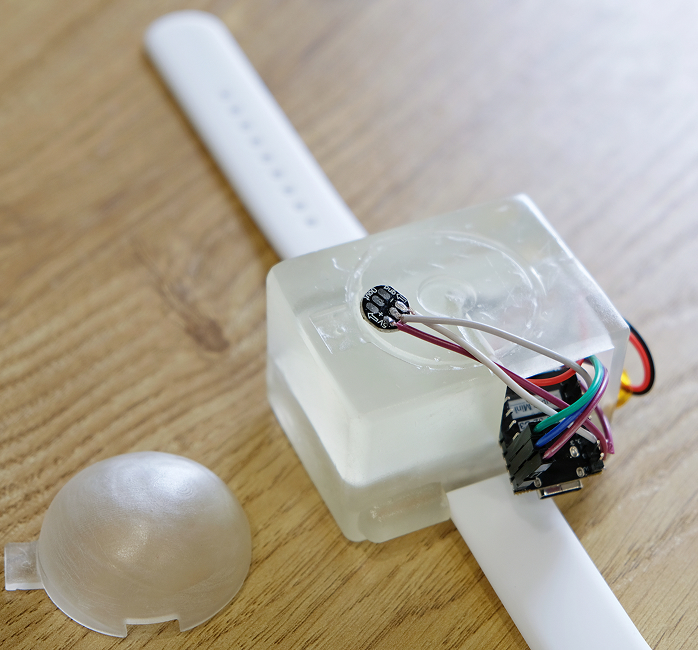
This prototype simulates canine arousal states through an LED-based visual language embedded in a standard collar form.
Rather than sensing a live dog’s physiology, the collar provides controlled, repeatable arousal inputs, allowing the interaction logic to be tested without introducing ethical risk.
This prototype simulates canine arousal states through an LED-based visual language embedded in a standard collar form.
Rather than sensing a live dog’s physiology, the collar provides controlled, repeatable arousal inputs, allowing the interaction logic to be tested without introducing ethical risk.
This modular architecture abstracts hardware implementation to emphasize interaction logic, illustrating how physiological signals are translated into rhythmic guidance for human regulation.
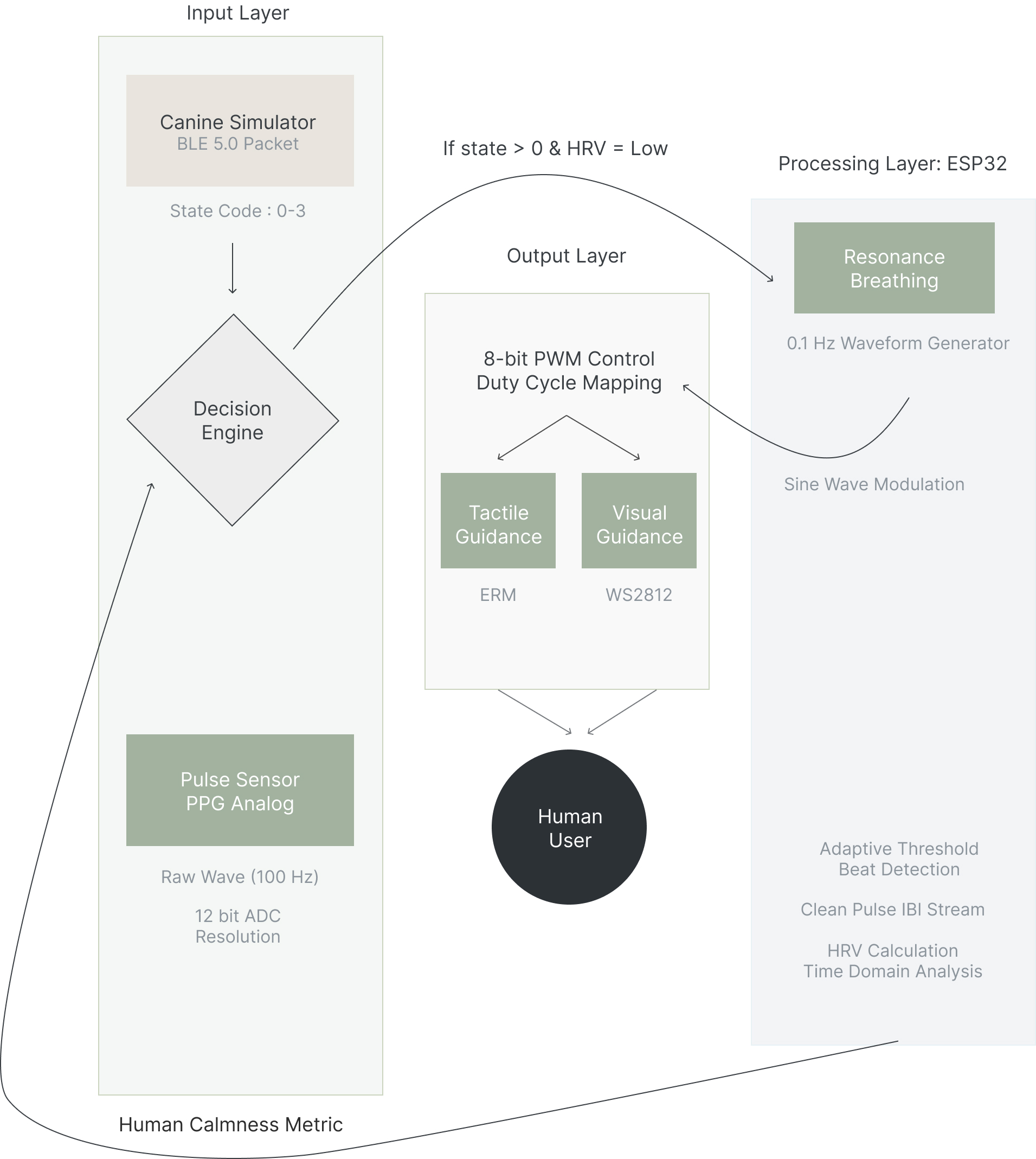
Note: Greyed elements indicate implementation details included to demonstrate technical feasibility, rather than core interaction flow.
To turn physiological synchrony into a usable system, I worked with a 3D modeling engineer to build two wearable prototypes, one for humans and one for dogs.
Each prototype uses a different form factor based on its role, physical limits, and ethical concerns. This led to a wrist worn device for human sensing and a collar based device for canine feedback.

To prioritize the dog’s comfort, I chose a standard nylon collar as the mounting base for the LED strip. Using an existing collar avoided rigid enclosures and reduced interference with natural movement.
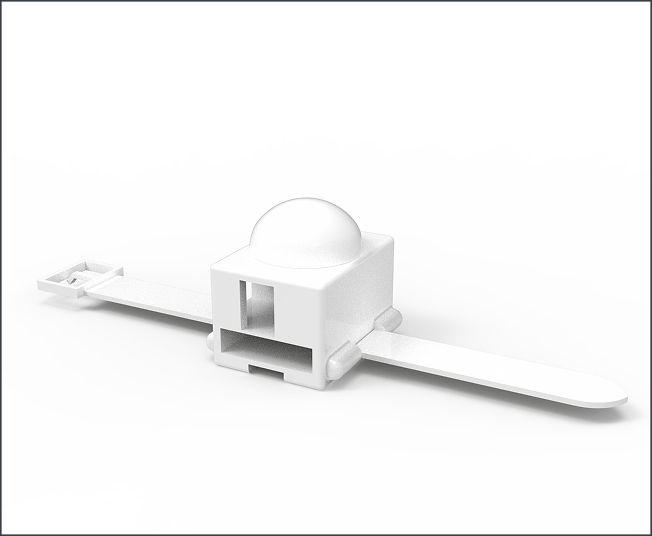
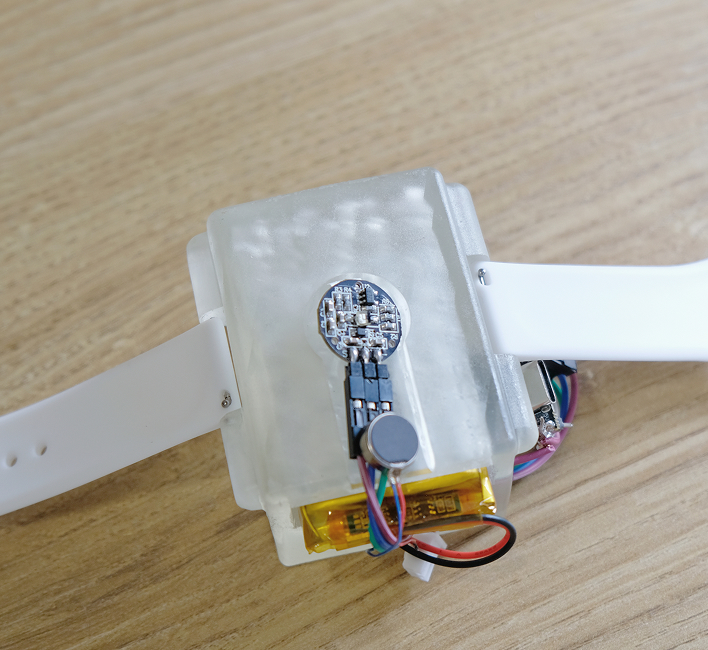
The human wearable uses a custom 3D-printed housing to stabilize a PPG sensor against the skin, enabling consistent heart rate measurement during interaction.
The form prioritizes lightweight comfort and stable contact, supporting reliable physiological guidance without restricting movement.
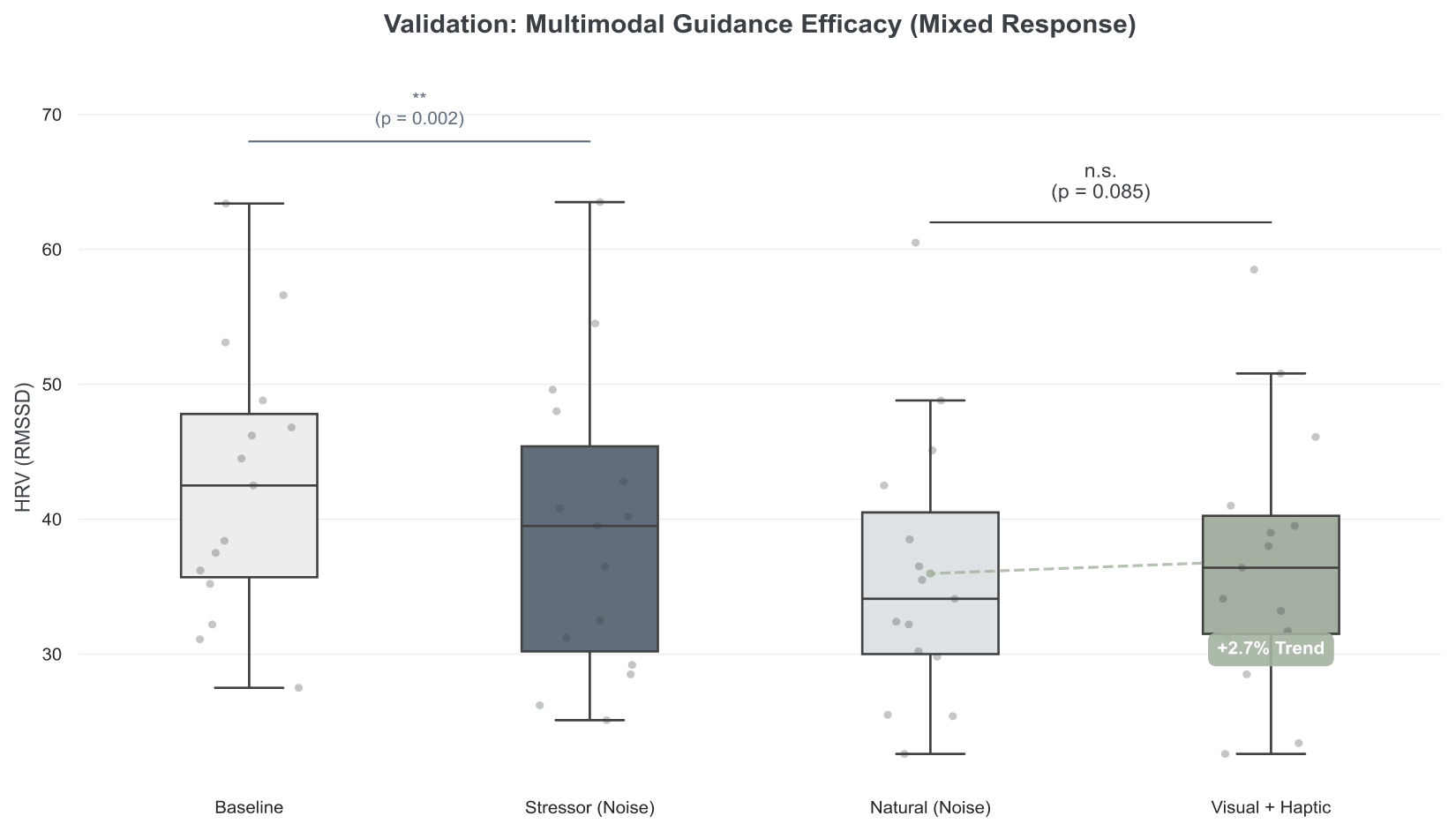
Validating Efficacy in High-Noise Environments
To validate whether haptic-guided breathing could regulate human physiology under stress, I ran a within-subject, counterbalanced experiment that isolated the human regulation loop under simulated kennel noise (70 dB) (N=15).
Condition order was counterbalanced across participants to control for sequence effects.
Data Processing
Signal cleaning followed established HRV preprocessing practices to reduce motion noise and measurement artifacts. RMSSD was used as the primary HRV index.
Result
Under identical noise conditions, multimodal guided breathing showed a positive trend toward higher HRV recovery compared to natural rest. While the difference did not reach conventional significance, the upward shift in RMSSD suggests a potential benefit of rhythmic multimodal cues for stress regulation, despite substantial individual variability in noise tolerance.
I conducted user testing sessions to evaluate comfort, perceived presence, and the transition from cognitive to somatic support.
01: From conscious control to embodied rhythm
Participants initially matched the breathing cues deliberately, then quickly shifted to following the rhythm without active thought.
→ Guidance intensity can taper once a stable rhythm is established.
02: Visual cues initiate, haptics sustain
Visual cues helped participants enter the rhythm, while haptics supported maintaining it without visual attention. Removing visuals too early caused uncertainty for some users.
→ Visual feedback should initiate rhythm, with haptics gradually taking over for sustained regulation.
03: Biological timing shapes trust
Heartbeat-like rhythms felt calming and alive, though transitions still felt slightly mechanical during prolonged use.
→ Smoother waveform transitions are needed to reduce mechanical perception and increase trust.
04: Form factor limits extended use
The prototype was effective in short sessions but felt bulky for longer or more active use.
→ Future iterations should focus on miniaturization and a lower-profile enclosure.
Lesson Learned
01: Set context early to reduce communication friction
When collaborating with a modeling engineer, I initially failed to provide sufficient project context. As the system grew more complex, this led to repeated back-and-forth and unnecessary communication overhead. I learned that investing time upfront to align on goals, constraints, and assumptions can significantly reduce cost later in the process.
02: Develop intuition for data before trusting results
Early on, I relied on a faulty PPG sensor that produced abnormal readings. Because I lacked a strong intuition for what RMSSD values should reasonably look like, I initially assumed the project itself was ineffective. After discussing the issue with lab peers and replacing the sensor, the data improved immediately. This experience taught me the importance of building a basic “sanity check” understanding of data before interpreting outcomes.
03: Learn to scope prototypes around technical limits
I initially planned to include sensing capabilities in the dog collar as well. However, fur movement and motion noise made low-cost sensors unreliable in this context. Recognizing this limitation helped me refocus the prototype on the human-side regulation loop, allowing the project to move forward without compromising validity.
This project was my first time initiating a physical prototype from scratch, from volunteer observations and interviews through to building and testing a working device. It deepened my understanding of how research insights translate into tangible systems, and how many constraints only surface through hands-on making.
I am especially grateful to the shelter owner for their openness and support, which allowed me to conduct multiple interviews and better understand why adoption rates remain low despite good intentions. This experience made me more aware of the practical limits of prototyping, but also reinforced how meaningful it can be to build alongside real communities.
I look forward to continuing this work with fellow shelter volunteers and iterating on the system together!